飞行器任务过程可视化
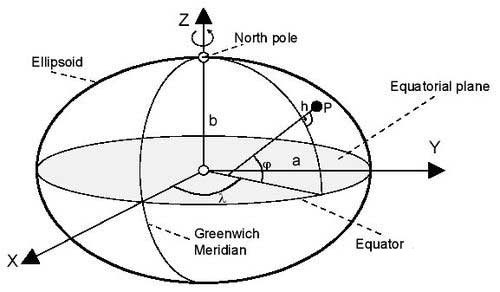
系统基于数字地球和惯性地理坐标系统,可构建一个满足飞行器发射任务要求的三维空间场景环境和仿真任务流程,在此基础上,模拟基于仿真数据实时驱动的飞行器发射、升空、飞行、分离、入轨或回收的动态过程仿真,为系统验证、分析、评估与指挥决策提供形象、直观的技术支撑。

仿真数据接口模块
内置坐标变换算法和位置、姿态、速度等仿真驱动数据接口模块。通过通信协议(UDP协议),可以将仿真计算机得到的仿真数据通过网络实时传给视景计算机,经过数据的变换解算后实时驱动飞行器的发射、升空、飞行、分离、回收等,同时实现姿态(包括位置、速度、姿态角度和角速度等)控制与实时仿真。同时包括由动力学模型生产的实时数据同步驱动机制,如塔架模型的收放、飞行器的动力学部件实时运动控制仿真等。
数据结构示例
| t(s) | Vx | Vy | Vz(m/s) | X | Y(m) | Z(m) | h(m) | V(m/s) | α、 β、 γ |
| 时间 | x、y、z方向的速度 | 位置坐标 | 高度 | 速度 | 三个姿态角 | ||||
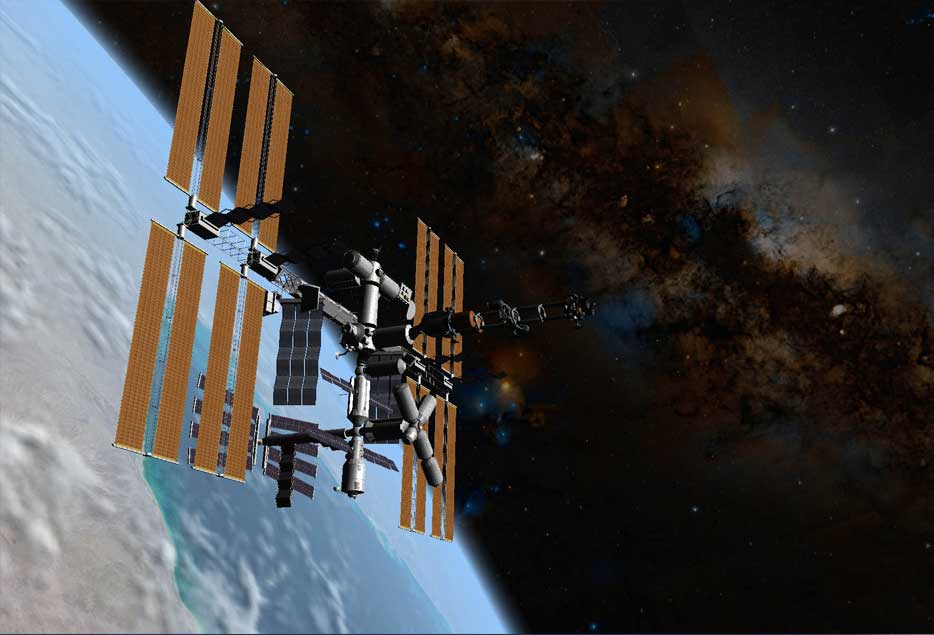
宇宙星系模块

系统模块根据真实的星等和星系坐标数据绘制出实际三维星系统空间,包括银河系内的太阳、月亮、地球等重要天体和星空星系太空环境。
二维同步地理信息系统
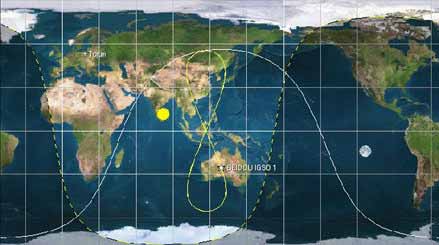
内置二维GIS模块,二维GIS地图上可同步显示飞行器的运动状态(位置、姿态、速度等)、弹道轨迹线、雷达、舰船、卫星及弹头的位置、名称、坐标等信息。
仿真特效模块

内置飞行器任务过程的特效模块,包括:
三维音效,如点火声效、飞行声效、爆炸声效仿真模拟;
火及烟雾仿真特效,如点火喷射烟雾效果、助推器尾焰、姿态调整喷气、爆炸毁伤等以粒子特效模拟;
打击爆炸效果以及实时光照效果;
环境特效:3D云层、海洋水面与波浪特效;
三维音效,如点火声效、飞行声效、爆炸声效仿真模拟;
火及烟雾仿真特效,如点火喷射烟雾效果、助推器尾焰、姿态调整喷气、爆炸毁伤等以粒子特效模拟;
打击爆炸效果以及实时光照效果;
环境特效:3D云层、海洋水面与波浪特效;
多视窗监控管理模块

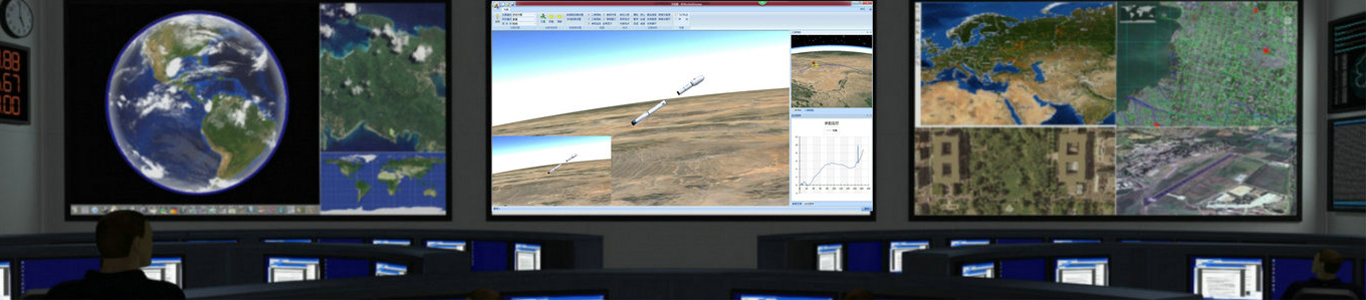
系统内置了可自定义的三维相机编辑模块,用户可根据需要,从不同的视角(第一人称视角或第三人称视角)设置一个或多个固定相机或跟随相机,系统可从不同视角、不同位置以画中画的形式显示飞行器的实时状态(如右图),同时支持静态视点、运动跟随视点、全局视点、局部视点和不同视点场景的实时切换功能。
系统同时支持多任务视窗,实时显示飞行过程中的各个技术环节的参数变化曲线、飞行轨迹、显示测控范围和飞行弹道的测控覆盖情况、显示飞行器的运动情况、显示飞行器与地面站相互关系,为技术和管理决策人员提供直观的评估环境。
系统同时支持多任务视窗,实时显示飞行过程中的各个技术环节的参数变化曲线、飞行轨迹、显示测控范围和飞行弹道的测控覆盖情况、显示飞行器的运动情况、显示飞行器与地面站相互关系,为技术和管理决策人员提供直观的评估环境。
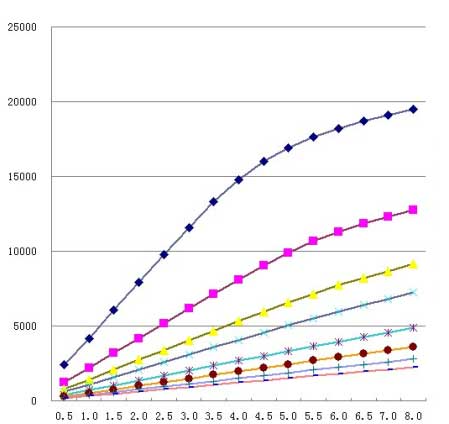
二维同步曲线模块
二维同步曲线模块可实时同步地显示一个变量曲线图,也可以同时显示多个变量曲线图。可以在一个坐标图中显示多条曲线,也可以在多个坐标图中分开显示。曲线图上的曲线的属性属性包括:线段的颜色、线段的粗细、标示点的形状、纵坐标的范围等。
三维交互与操作功能
系统支持实时交互功能,系统内置一个满足地理场景用户基本需求的实时仿真交互浏览模块,其中包括漫游、驾驶、行走、飞行等场景浏览交互方式,用户可以根据需要选择不同的浏览方式。也可以根据需要配置演示视点,然后可通过鼠标拖拽的方式,可任意旋转改变视角进行交互浏览,同时支持仿真过程的暂停、回放、视角切换切换等交互功能,也可以进行视点缩放(拉近拉远)、平移、旋转等交互。
任务流程设计
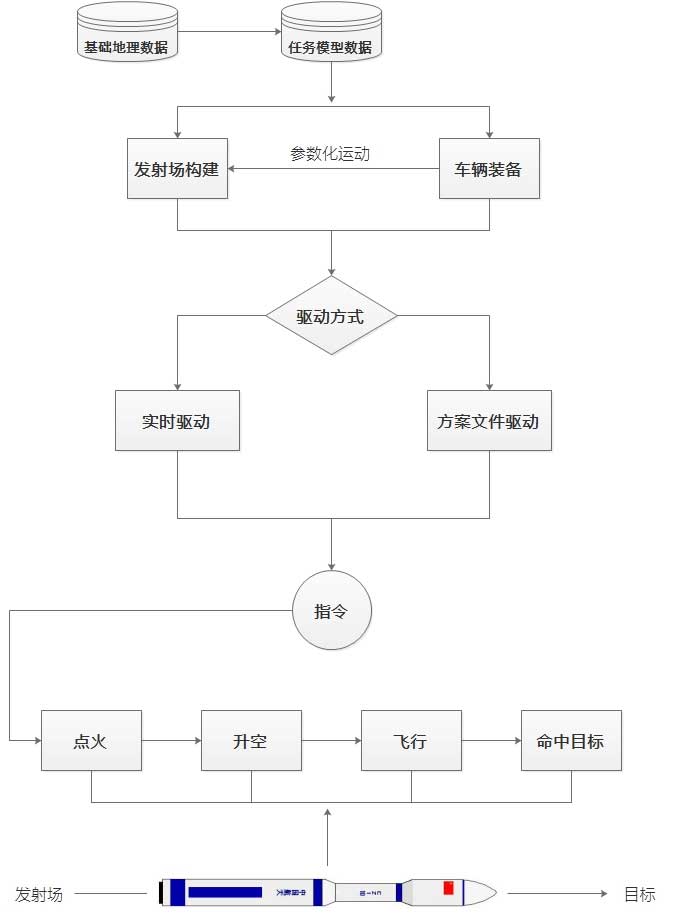
在构建了逼真的三维空间环境、数据环境的基础上, 用户可根据需要,实时地动态模拟运载火箭的发射、飞行与控制过程,实现相关事件的过程再现。为系统验证、仿真评估与指挥决策提供更加形象、直观的技术支撑。过程主要包括:
支持接收运载火箭发射指令,塔架模型收放,运载火箭点火,升空。
支持接收实时仿真数据,包括飞行位置、分离指令、姿态、速度等信息,系统通过接收到的实时仿真数据驱动飞行器的飞行状态,实现过程控制,流程如图:
数据驱流程设计
系统为飞行可视化提供“预置方案数据驱动“和”实时外部数据驱动“两种驱动机制。

仿真示例