







无人艇模拟训练与仿真操控演练系统(无人船及水下潜航器操控驾驶模拟器)
无人艇(船)模拟训练与仿真操控演练系统,是一种基于三维地理坐标系统和虚拟仿真技术的训练操控及数据验证系统,也是一种“无人装备半实物仿真实验台与操控模拟器”。适用于水面无人舰艇、船只和水下潜航器的模拟操作训练、仿真演练和数据验证。
系统实时模拟逼真的三维地形地貌、海洋环境、日地光照、大气天气现象环境和地球同步时钟系统,同时模拟无人艇或水仙潜航器的水面、水下作业环境和作战(作业)过程,如:海面风浪模拟、水体效果模拟、水下光照光晕模拟、水下地形地貌模拟,在此基础上实现基于半实物仿真实验和操控训练演练。

无人船无人艇半实物仿真实验台(图)
同时,系统也是基于电子海图系统,面向无人艇操控训练演练和功能验证的专业无人艇模拟仿真训练平台。可实现基于仿真数据驱动和手动实时交互控制的航行(或潜航)过程指控仿真。系统配置了多种无人艇操控训练演练场景环境和无人船的仿真型号,针对攻防演练、巡检、侦查监测、反恐、走私等业务需求模拟各种环境,实现多种情景模式的训练演练。

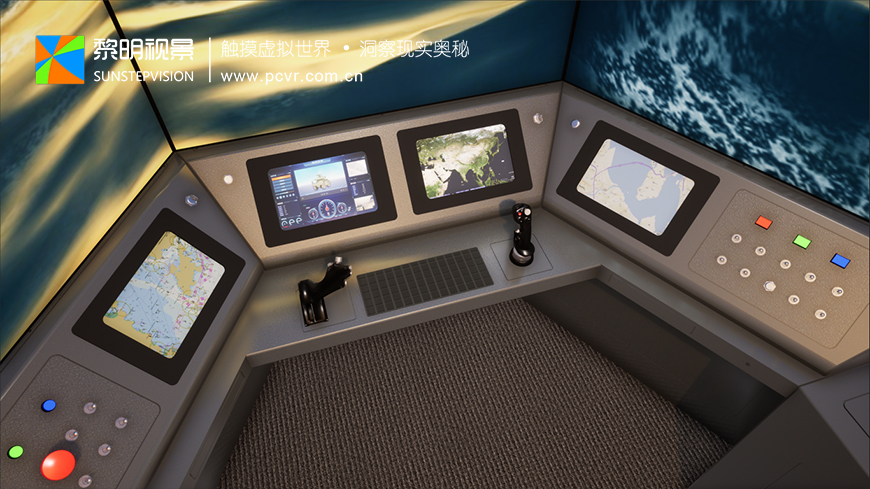
无人装备(无人艇)模拟训练器(图)
其中,无人艇载荷主要是光电载荷(机载相机、红外、雷达等侦测设备)和武器装备等机载设备,系统根据实际数据构建了光电传感器和武器装备的动力学模型。
系统按照无人艇的物理数据和1:1的比例,构建高精度无人艇三维仿真模型,同时根据机械原理、机构方程、物理属性和仿真交互要求,仿真无人艇的动力学模型。
同时构建无人艇航行驱动数据接口,包括航行控制参数接口,如:速度、油门、姿态、位置等转。系统基于数据驱动,可以实时动态地仿真无人艇或水下潜航器作战过程、位置、姿态、运行轨迹、作战行动等信息。包括水面舰艇、水下潜航器的过程控制、传感器仿真,如声呐、雷达等,实现基于数据驱动的实时仿真与动态呈现。

