







无人车“指挥控制与协同作战”虚拟仿真演练系统
总体目标任务
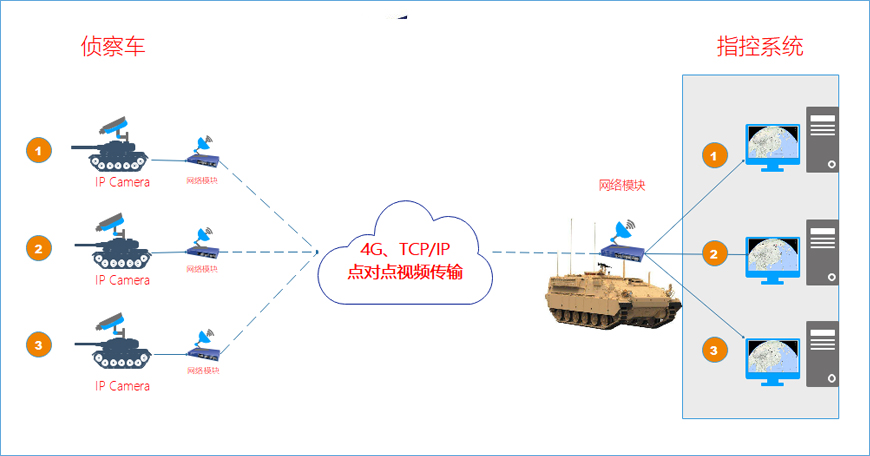
无人车“指挥控制与协同作战”仿真演练系统是基于无线通讯技术(如4G/5G、图传电台等)、无人驾驶控制技术(如传感、红外、雷达与图像识别等)、数字地图技术和虚拟仿真技术构建的无人车指挥控制与集群协同作战虚拟仿真演练系统。
无人车“集群协同作战指挥控制系统”以指挥车为中心,多个“无人车”为作战单元,共同构成一个集群协同作战小组,在“指控车”的集中控制下,由多个“无人车作战单元”协同完成“察打一体”的作战任务,从而为“反恐作战”和“应急事件处置”提供重要的技术支撑和作战指控平台。

无人车协同作战与指挥控制系统基于无线通信网络接收各种指令、情报等数据信息,并对这些数据进行显示、分析、融合,为指挥人员提供决策依据。同时无人车指挥控制系统软件能通过无线通信网络下发各种指令、位置、战场态势等数据,也能通过操控设备直接对远处的无人车进行操控,包括车辆操控和武备操控,从而实现多机协同作战和任务过程的指挥控制。
无人车“集群协同作战指挥控制系统”的重要特点:小型轻量化,低成本;远程指挥与控制,减少人员伤亡;分布式部署,灵活机动,协同作战。
无人车指挥控制与协同作战仿真演练
协同指挥控制和无人车协同作战:是指在“无线通信网络和指挥控制协同软件系统”框架下实现的“指挥控制人人协同”和“无人车作战协同”。
系统根据多个无人车“指挥控制与协同作战”的工作原理和业务要求,利用虚拟仿真技术和三维GIS技术,构建一套能模拟实际战场环境和多机协同作战流程的虚拟仿真演练系统。系统以一个或多个“指控车”为中心,多个“无人车”为作战单元,共同构成一个基于“虚拟网络通信协议”的集群协同作战小组,在“指控车”的集中控制下,由多个“无人车作战单元”协同完成“察打一体”的作战任务,从而为“反恐作战演练”和“应急事件处置演练”提供重要的技术支撑平台。

指挥控制“人人协同”:是指控制席位的指挥员不仅可以指挥控制自己的无人车驾驶和上装系统(侦查探测与火控系统),查看各种侦查数据和车辆数据信息,同时也可以指挥控制其他无人车的驾驶系统。指挥员之间也可以根据作战需要相互发送自己获取的情报信息,如:不同战场要素的坐标位置、姿态、第三视角图像等。
无人车作战协同:主要是根据指挥车的任务指令,无人车在执行作战任务过程中实现无人车之间的“多打一协同打击”和“多车配合打击作战”,包括:无人车侦查协同、打击协同和察打一体协同。

无人车根据指挥指令到达目标区域后,系统会实时呈现目标位置的战场态势和空间分布。同时,指控软件系统针对无人车和战场态势,实时生成一个小型动态数据库或动态配置表,包括每一个战场元素的状态数据,如:目标位置、目标类型(无人车侦查结果)、姿态动态、直线距离、任务路径里程、车辆类型以及无人车的装备种类、数量、当量、射程、油量电量等数据信息。
作战过程中,系统内置的“辅助决策算法”,可对上述战场元素的数据信息、态势分布信息和目标类型进行实时计算分析和决策, 系统根据上述的分析给出判断:由哪辆或哪几辆无人车、使用哪种或哪几种武器进行火力打击,或者是进行组合打击。根据上述辅助决策结果,系统会在指控软件的的显控界面上,实时显示“决策结果和建议”,指挥员或操作员根据该结果对目标进行“打击操作”。

