








机构动力学虚拟仿真平台
Vortex
Vortex
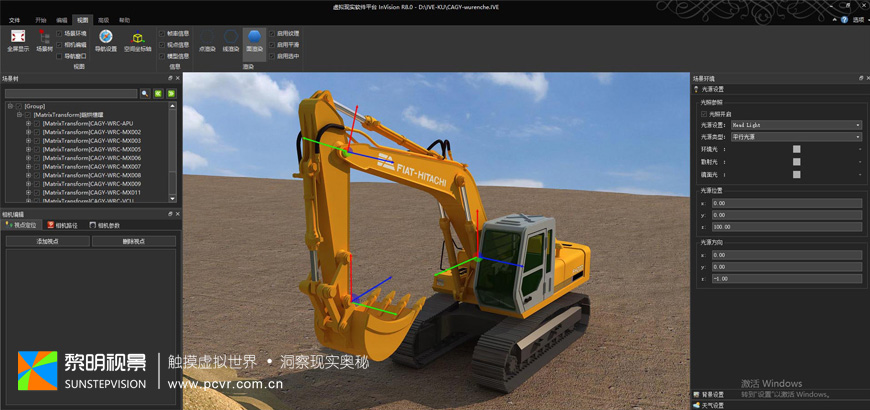
工程作业与机械动力学虚拟仿真系统是专门用于模拟重型车辆、大型工程装备、机器人等特种装备工程作业过程的虚拟仿真系统解决方案,是集机械动力系统仿真、作业环境仿真、流体力学、控制系统等于一体的多学科动力学虚拟仿真系统。系统可以不仅模拟各种真实的工程装备作业环境外(包括陆地和海洋环境),还可以进行实时交互操作,包括驾驶、操作与控制,用户在进行动力学模拟的同时,还可以实时地修改各种动力学参数以验证不同状态结果。
系统方案功能特点
- 除了由传统的多体系统仿真功能外,还带有一个庞大的虚拟环境建模工具箱,可以利用实测的地形数据或设想的战场环境来建立各种作业现场环境;
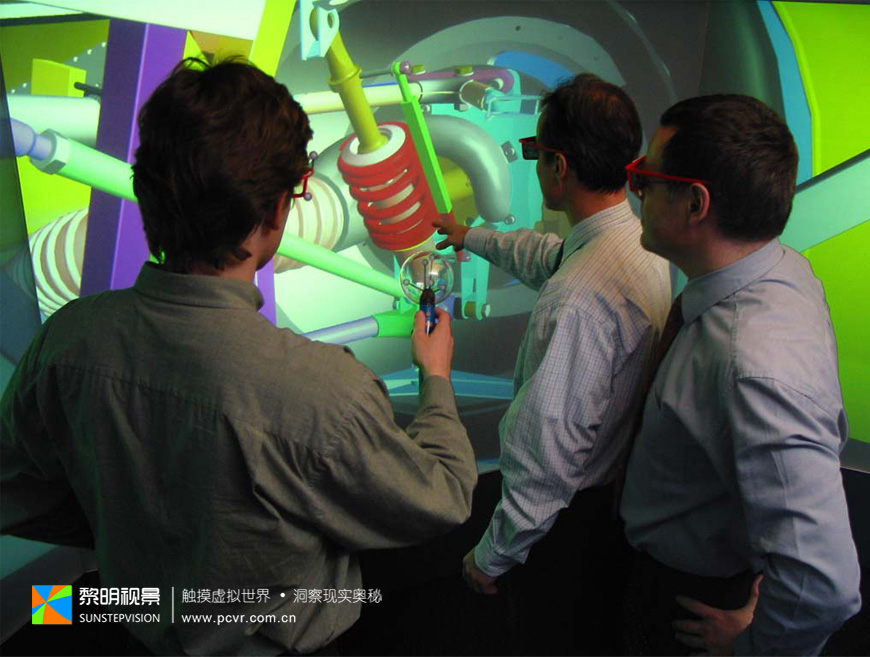
- 利用本方案可以将精确真实的物理过程模拟出来,并产生一个交互式的仿真操作环境,例如履带车辆、机器人、起重机械、登月车辆的远程操控和训练。
- 方案可以模拟多刚体系统动力学、碰撞干涉检测、干涉响应以及高仿真度的车辆动力学。系统提供常用工具箱可以产生多个模拟器进行运动和环境仿真。
- 本方案是一个开放的仿真环境平台,采用标准的C++语言,用户可以在现有的平台基础上开发适合自己的应用环境。
本方案基于经典的牛顿定律,主要应用在国防和大型工程装备作业训练领域,例如工程车辆、装备、石油装备、机器人等模拟仿真应用。
系统动力学模拟性能
- 带运动的机械系统;
- 考虑系统中的摩擦、惯性、扭矩、转动等;
- 复杂的丰富的零部件连接运动幅;
- 连接弹簧单元;
- 无侵入的刚性碰撞约束;
- 考虑大型的复杂机械系统,例如履带车辆;
- 支持开环和闭环的机械系统;
- 几乎所有的特性可以在仿真的同时进行实时的修改;
- 可以得到精确的接触载荷;
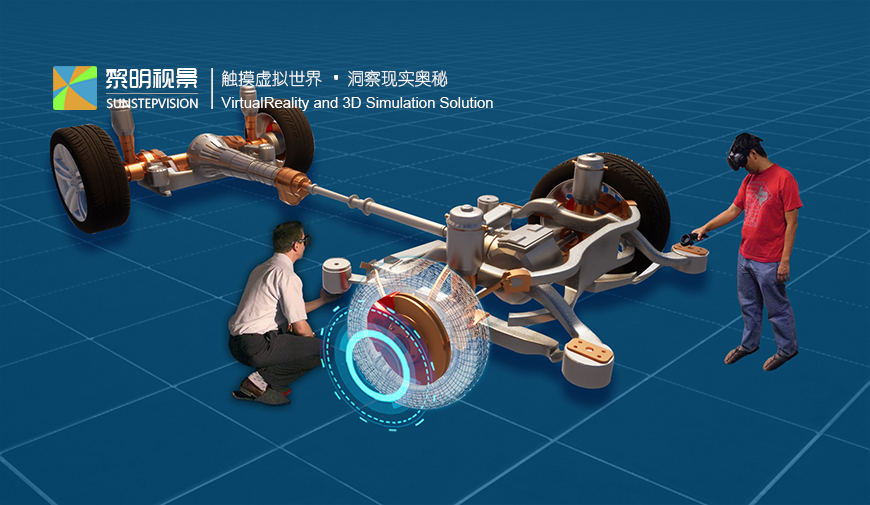
- 稳定精确的车辆系统仿真,包括悬挂模型、车轮、驱动系统等;
- 车辆系统的轨道模拟等。
碰撞检测技术性能
- 利用精确的碰撞响应快速的进行干涉检查;
- 包括粗糙的、精确的和符合的几何外形模拟;
- 支持的地形描述:三角单元、高精度四边形等;
- 优秀的利用方向边界箱(OBB)的网格干涉检查;
- 碰撞干涉检查将对所有的物体均进行法向、侵入距离和表面的分离距离的分析;
- 预估得到碰撞时间;
- 对于交互发生的干涉建立有专门的传感器等;
- 降低产品研发的风险,并加速产品的上市;
- 开发可以用于产品操作的模拟器。
场景装备与环境模拟
- 可以模拟不同的地形、地貌,各种各样的路面环境,例如,硬路面、雪地、沼泽地、沙地以及水潭,
- 可以模拟特种车辆、工程机械、船舶、机械手等在水域中的运动等。
- 可以建立水域模型,本方案是唯一可以同时模拟车辆在陆地和水上运动的仿真平台,为两栖车辆的仿真提供了一个完美的解决方案;
典型行业应用
- 高真实度的地面车辆战术、战场环境的模拟;
- 无人驾驶车辆的导航系统;
- 航天器的在轨飞行和着陆分析;
- 港口、码头灯起重设备的操作分析;
- 机器人远程控制和操作;
- 航空飞行器的模拟;
- 人员的训练:车辆驾驶员、火炮操纵系统人员或者其他操作员的训练;


