







工程机械作业仿真训练
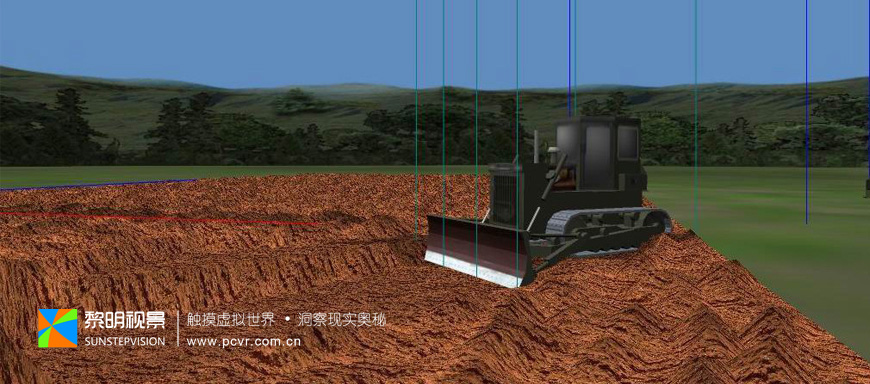
以推土机挖掘机实际训练要求为依据,构建与实际训练场所的空间数据相一致的推土机挖掘机3D仿真场景环境,并在此基础上,开发挖掘机推土机驾驶与作业仿真训练软件系统,为工程机械操作人员提供一个高度逼真的数字化实时模拟仿真训练平台与操作环境,并内置数据库和考评评价体系,建立学员档案,实时记录纠错并给出训练报告。

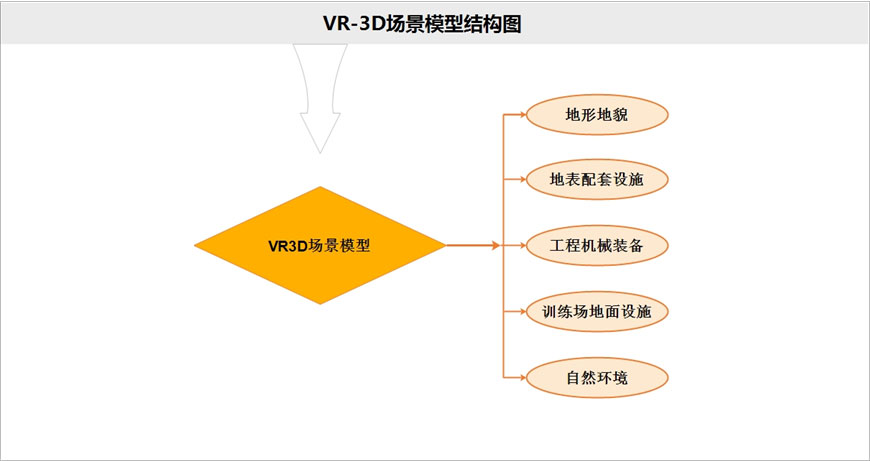
挖掘机推土机驾驶与作业训练三维场景环境
地形地貌3D模型:根据实际测量的地理数据,即数字高层影像数据DEM和DOM构建3D地形地貌场景模型;
地表及配套设施3D模型:根据实景数据和CAD规划数据构建地表及附属设施三维场景模型,包括作业区域、建筑、道路交通、植被等地面及地表设施模型;
训练场设施模型:根据CAD数据或训练作业特性的要求,构建的“训练作业面”和“驾驶作业面“3D场景模型;
工程机械驾驶与作业关键技术实现
物理碰撞检测:包括挖土、填土、平土等过程中铲刀与土壤的碰撞检测效果(包括前后左右上下等各个方向的碰撞检测效果)。

作业轨迹模拟:驾驶过程地形跟随、轮式和履带式机械的驾驶轨迹以及重复轨迹叠加效果模拟。
物理形态变化效果模拟:实现静态模型(土堆、废墟、斜坡等)被挖掘、铲刮后、碾压后地表的形态变化,形态的变化量与模拟器的实际动作参数相关联。
物理属性及特效模拟:实现落土、沙、石及挖掘过程的高仿真物理属性与效果,对场景内的可视物体设定物理控制属性,对机械和相关联的物体赋予力学属性,包括自由落体、碰撞等。
连带事件仿真:作业对象(土壤等)的真实过程模拟仿真(如落土过程的真实性模拟)合理性检测、触发相应事件和连带事件,实现错误动作、危险动作等不合理性操作的提示和警告,以及碰撞后损伤程度评估提示。
其他特效模拟:如与机械装备的运转状态相适应特效模拟,如机械震动、烟雾排放、三维音效、后视镜等。
工程机械(推土机、挖掘机)机构动力学三维模型
根据CAD数据或成型的工程机械装备数据构建3D工程机械装备模型,包括多种型号的推土机挖掘机3D机构动力学模型。模型仿真机械动力学特性,能够反应机械行驶和作业操控系统变量及其运动的客观性与合理性,并实时显示控制效果和反馈控制信息。



实时操控驱动和机构动力学过程仿真
系统内置模拟台外设数据接口和机构动力学仿真驱动模块,支持外部操控硬件(驾驶室操纵杆、方向盘等)等设备的数据通信和场景驱动。
内置动力学仿真数学模型中设计的运动方程和线性控制方程可准确地驱动机械装备三维模型的各个部件,并准确地反应机构运动特性和动力学过程。
驾驶操纵时,整车可实现前进方向、侧向、垂直方向的线性运动和俯仰、横摆、侧倾的转动。

作业时可实现机械联动结构(机械臂)和转向轮角度、角速度、支腿、动臂调整、动臂、斗杆、挖斗、回转等同步关联运动。

协同仿真作业训练
系统基于C/S架构设计,内置分布式协同仿真模块,可实现不同种类工程机械模拟器之间的互联互通,通过协同配合作业,使其能够在同一复杂施工场景内完成联合或独立的施工作业,实现同一场景中多机协同作业训练。
训练评价与考核
系统内置操作规则和评价数据库,,可根据机械操作过程中的错误动作、危险动作、工作效率进行打分评价。

