基于计算机触觉和力反馈技术的分布式协同交互解决方案
proSENSE™ 功能介绍
Handshake proSENSE™1.3 Virtual Touch Toolbox 是一款面向计算机触觉和力反馈应用的协同交互仿真开发平台,该软件平台建立在成熟的MathWorks MATLAB® 和 Simulink®开发平台之上,并对OpenGL图形库和Openhaptics触觉反馈开发类库进行高层封装,它可使开发者和研究人员通过简单的鼠标拖拽和键盘输入即可以迅速实现本地化的触感和力反馈应用,或者是分布式触感和力反馈远程协同应用。开发人员从此不再需要进行大量的与自己专业不相干的基础研究工作(比如复杂的计算机碰撞检测技术研究) ,从而节省大量的时间和精力用于自身领域的专业研究,大大缩短开发时间,提高科研人员的研发效率。而且, 高度优化的封装算法可以使用户的开发和应用不再依赖于超级计算机或大型工作站, 用户可以在普通的PC工作站甚至是高档的笔记本电脑上开发和运行自己的触觉和力反馈应用。
Handshake proSENSE虽然进行了高度的技术封装,但是仍然具备二次开发的功能和加入自定义代码的弹性,这样用户仍然可以随心所欲地对自己的触觉和力感应用进行二次开发,随意添加自己的逻辑和独特的应用功能。
Handshake proSENSE的另一个独特的功能点就是实时的分布式远程协同交互,这种协同交互功能可直接通过世界范围的互联网来实现,该工具能够通过触觉装置、网络协议、预定义的触觉效果来执行,然后通过时间延迟补偿技术来获取分布式协同触感或力反馈交互。
一旦加入proSENSE Network选项模块,其特有的时间延迟补偿技术TiDeC可使开发人员快速的创建基于网络的远程触觉与力反馈协同交互应用,这种实时的远程协同交互应用绝不会应为互联网的带宽和流量限制而出现丝毫的延迟和中断。proSENSE 可以适用于各种不同范围的基于网络的分布式协同交互。
另外,传统的虚拟仿真技术只局限于三维图形立体的视觉模拟和多自由度的人机交互功能,很难在虚拟仿真应用环境中添加具备数据采集和仿真分析功能,而Handshake proSENSE以成熟的MathWorks MATLAB® 和 Simulink®为支撑平台, 绑定应用,这样用户就可以很方便地将虚拟仿真与数学仿真分析的开发和应用结合起来, 建立起真正意义上的计算机仿真应用。
总之, 无论资深开发人员还是初级人员都可以快速的开发触觉应用、开发基于网络的分布式协同交互和应用图形程序。
适用领域
- 医学模拟仿真
- 触觉与力学模拟仿真和分析
- 力数据采集和分析
- 虚拟现实仿真训练
- 远程培训
- 电子超声波
- 远程诊断
- 遥控飞行器远程控制
- 场地清理
- 无人驾驶航行器控制
一.proSENSE功能解析
1.proSENSE的优势
- 集成了触觉和力反馈应用解决方案;
- 快捷的拖拽开发环境和友好的用户界面;
- 远程的网络协同交互功能;
- 强大的效率优化工具,大大减少了开发时间;
- 力数据采集和分析能力;
2.特征
- 内建 SensAble PHANTOM® 力反馈设备的™支持;
- 附加了对SensAble Premium 1.5触觉设备的支持;
- 在MATLAB/Simulink 环境中提供了可自定义的触觉模块;
- 可以和Real-Time Workshop 及 Virtual Reality Toolbox 无缝协作;
- Network选项可以支持电磁触觉以及通过TiDeC 实现的专有网络延迟补偿技术;
- 可以快速开发应用模型;
- 支持自定义的C/C++代码整合;
- 全面的帮助系统;
3.力数据分析能力
您现在可以实时的跟踪位置和力数据。具备MATLAB应用环境的常规特性,可以全面快速的分析数据。
目前,全面的力数据可以用于复原方面的研究,医学仿真开发以及训练环境。
4.分布式触觉
加入了Network Option,可以快速的创建电磁触觉proSENSE应用。通过对Handshake的专有时间延迟补偿技术
TiDeC的整合,proSENSE 可以测试和调整各种不同范围的基于网络的应用。
5.proSENSE Network 特征
- 在仿真的环境中执行和测试网络延迟的数据包的丢失;
- 用户可以选择网络协议;
- 提供多种网络延迟补偿技术;
- 可以自动同步网络系统;
6.完整的帮助
Handshake proSENSE与MATLAB帮助浏览器完全结合在一起,并可以直接访问更为全面的在线帮助,包括:目录页、手册、搜索页及文档。
7.系统需求
- 针对不同的proSENSE配制请参见系统需求页,通过该页面可以进行全面的需求总览。
- 如果proSENSE和Network选项一起购买则包含了Network功能。
二、Handshake proSENSE™ Network Option
在你的触觉应用中加入网络和时间延迟补偿
Handshake proSENSE® Network Option提供了一个强大的设计模块集,可以将网络功能加入到你的触觉应用当中,同样也能加入网络环境下的仿真和延迟补偿。
以上的高级网络能力使实现各种各样的电子触觉界面成为可能。利用到这些特性的应用主要有:
网络模块
利用网络模块,proSENSE应用可以通过网络连接来发送、接收数据,使用的协议为:TCP/UDP。使用TCP/IP协议可以保证传输的质量(例如:保障信息包的次序并且信息包的丢失率为0%),但使用UDP可以减少网络延迟。
网络仿真模块模拟真实的网络环境。可以选择一种延迟模式(例如:持续延迟,随机均匀分布延迟,随机常规分布延迟或用户定义的特殊延迟模式)和数据包丢失模式(例如:周期或百分率)。同时也包含其他的网络功能模块,例如:缓冲块和网络通讯记录模块。
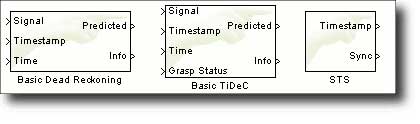
1. 时间延迟补偿模块
包含了Handshake TiDe® 运算法则。运算法则的参数可以通过用户界面利用直觉概念,例如:“运动速度”,“设备当前占用”以及“抢占时间延迟补偿”。包含了公用的预测技术,例如:航位推测法。
在电磁触觉应用中,STS模块在每一个计算机中同步时钟。
2. 将此选项综合进你的开发包
购买proSENSE网络选项或对现有程序进行升级请参见“Where to Buy”页面。
三、Handshake proSENSE™ SensAble™ Premium 1.5 选项
在 proSENSE触觉应用中加入对SensAble Premium 1.5的支持
只需要加入一个设备模块,利用Handshake proSENSE SensAble Premium 1.5 选项就可以在proSENSE应用中结合该高端触觉设备。
购买proSENSE的该功能选项或对现有的proSENSE进行升级请与我们联系。
四、proSENSE Lab Kit专为教育工作者设计
增强您的实验室结合Handshake proSENSE™ Lab Kit是时候来对你的机器人实验室进行一次革命了!
教育工作者和研究人员可以通过Handshake来拥有完美的机器人从而提升实验室的配置,并可以在教学和研究中轻松的使用。Handshake proSENSE Lab Kit非常适合于:控制实验室、机器人实验室、试验项目及研发项目。
不管是对于本科生还是研究生而言,Handshake proSENSE Lab Kit都可以为学生研究、基础控制规则、快速研发以及原型开发快捷有效的建立起你的实验室。
1. Handshake proSENSE Haptic Lab Kit的组成
- Handshake proSENSE Standard
- Handshake proSENSE Network
- A SensAble PHANTOM® OMNI**
- 实验室手册
- 技术支持
所有你所需要的东西都包含在了一个便携包裹中。
Handshake proSENSE 实验室系统
目前Handshake 提供了大量的实验室预先练习项目,你的学生可以利用这些项目来学习和了解最基本的力反馈和远程力反馈概念。将其直接从Lab 手册中拷贝或做一些修改以适应你的课程。这样你就可以将更多的时间投入到你的学生或关注你的研究以及发布成果上。
2. 实验室手册的内容包括
- 工具和设备说明
- 机器人的PID控制
- 数字控制的取样效果
- 前向和反向运动学
- 触感(触觉)
- 远程触觉
你可以通过下载“Handshake Lab Kit Offer”来获取实验室手册的概要,或者通过和我们练习来获得手册的免费拷贝。
3. Handshake proSENSE虚拟触觉工具箱
Handshake proSENSE虚拟触觉工具箱是一个创建触觉和基于网络的触觉协议应用的快速原型开发工具。Handshake proSENSE的图形编程环境基于MathWorks MATLAB® 和 Simulink®开发平台。易用的拖拽环境能让初学者快速的开发和测试设计项目,同时非常完善的给高级用户提供了一个应用开发的环境和新的触觉技术和方法的扩展。
Handshake proSENSE利用MathWorks的虚拟现实工具箱来创建基于VRML的图形环境并利用MathWorks Real-Time Workshop®来将最终的应用编译成实时的代码。Handshake proSENSE的一个关键组件是Handshake自身时间延迟的补偿技术-TiDeC®。应用TiDeC配置,一个局部的触觉应用可以很容易的扩展为远程触觉应用,并能保证最大的稳定性和透明度。
作为基于MATLAB的产品,Handshake proSENSE的应用程序同样可以利用MATLAB提供的扩展工具箱和第三方解决方案。
五、特殊项目
将机电、机器人和触觉技能加入到您的项目当中。
Handshake拥有一支超过100个训练有素员工的团队,该团队随时准备为您和您的触觉、远程触觉、机器人相关项目提供援助。我们的机电博士们可以随时为您正在计划当中或任何处于实施阶段以及自主项目提供援助。
可以通过打电话来咨询我们对您的具有挑战性项目所能提供的援助,我们熟悉政府基金项目,这些项目包括:CITO, CFI, SBIR, European Framework, IRAP等等。
1. 项目类型
- 医学
- 远程触觉
- 虚拟现实仿真训练
- 远程指导
- 远程超声波检测
- 远程诊断
- 娱乐
- 在线触觉游戏
- 危险环境
- 遥控操作车辆
- 地面清洁
- 无人机控制
- 服务机器人
- 学术领域
- 带触觉功能的远程机器人的市场正在迅速扩大。涵盖了非常广泛的各种领域,从生命救援应用到大众娱乐。随着宽带网络服务的蓬勃发展以及工业和个人机器人市场两位数字的增长,远程机器人和交互远程触觉的市场障碍正在不断下降-这给予了Handshake的TiDeC技术和触觉技术一个空前的发展机遇。
2. 解决网络远程操作的问题
- 反应时间-处理在实时交互中的网络时间延迟
- 稳定性-在网络环境中TiDeC技术对跳变和保持稳定性的补偿
- 透明度-主从设备可以协调运转
六、硬件设备
作为触觉设备销售商,北京黎明视景公司可以给工程研究机构提供PHANTOM硬件设备的全线产品。请通过以下的电子邮件获得相关信息:Solution@pcvr.com.cn
1. SensAble PHANTOM® Omni™
自由度位置意识便携式设计,便携式设计和紧凑的底座带来了工作时的灵活性,舒适的浇铸橡胶铁笔坚固耐用且带有安全把手,可拆卸的铁笔能满足用户自定义的需求,与铁笔连接的两个闪存记忆体简单易用并能满足用户自定义的需求。
腕关节的放松可以使用户获得最大的舒适紧凑的工作空间更加易用由金属部件、铸模、碳化纤维加固塑料构造铁笔停靠坞可以进行自动工作空间校正。
2. SensAble PHANTOM® Desktop™
- 6自由度位置感觉
- 便携式设计和紧凑的底座带来了工作时的灵活性
- 舒适的浇铸橡胶铁笔坚固耐用
- 与铁笔连接的唯一的闪存记忆体简单易用并能满足用户自定义的需求
- 腕关节的放松可以使用户获得最大的舒适
- 多功能指示灯
- 紧凑的工作空间更加易用
- 由金属部件、铸模、碳化纤维加固塑料构造
- 自动工作空间校正
3. 对比不同的力反馈与触觉反馈设备
SensAble PHANTOM 1.0
Premium 1.0设备可以提供大概为人的手腕绕腕部旋转的运动范围。Premium 1.0设备包括了被动式的铁笔和万向节套管,可以提供3个自由度的位置感应和3个自由度的力反馈。可编程万向节铁笔(需单独购买)可以对另外的3个位置感应(倾斜、摇摆、偏航)进行测量。Premium 1.0设备通过并口(EPP类型)与PC连接。支持的操作系统包括:Windows. 2000/XP/NT, RedHat Linux 7.2, RedHat Linux 9, RedHat Fedora, SUSE 9.0. PHANTOM Premium 1.0 HF (高强度力感)设备可以提供更强的力感,该版本的设备包含了内置的齿轮箱选项。
SensAble PHANTOM Premium 1.5
Premium 1.5设备可以提供大概为人的小臂绕肘部旋转的运动范围。Premium 1.5设备包括了被动式的铁笔和万向节套管,可以提供3个自由度的位置感应和3个自由度的力反馈。可编程万向节铁笔(需单独购买)可以对另外的3个位置感应(倾斜、摇摆、偏航)进行测量。Premium 1.5设备通过并口(EPP类型)与PC连接。支持的操作系统包括:Windows. 2000/XP/NT, RedHat Linux 7.2, RedHat Linux 9, RedHat Fedora, SUSE 9.0. PHANTOM Premium 1.5 HF (高强度力感)设备可以提供更强的力感,该版本的设备包含了内置的齿轮箱选项。
SensAble PHANTOM Premium 3.0
Premium 3.0设备可以提供大概为人的整个手臂绕肩部旋转的运动范围。Premium 3.0设备包括了一个指套或万向节把手(二选一),可以提供3个自由度的位置感应和3个自由度的力反馈。可编程万向节铁笔(需单独购买)可以对另外的3个位置感应(倾斜、摇摆、偏航)进行测量。用户可以选择安装可编程铁笔、指套和用于进行手臂装配的万向节把手(需单独购买)。Premium 3.0设备通过并口(EPP类型)与PC连接。支持的操作系统包括:Windows. 2000/XP/NT, RedHat Linux 7.2, RedHat Linux 9, RedHat Fedora, SUSE 9.0. PHANTOM Premium 3.0 HF (高强度力感)设备可以提供更强的力感,该版本的设备包含了内置的齿轮箱选项。
4. 对比 Premium Models 1.0 ,1.5 ,3.0
SensAble PHANTOM Premium 1.5、3.0 6DOF
用户可以利用PHANTOM 1.5/6DOF 和 3.0/6DOF 设备在需要进行6个自由度力反馈(6DOF)的领域当中进行开发应用。例如:虚拟装配、虚拟原型、路线预置维持、遥操作、分子模型。模拟扭矩力反馈可以感觉到碰撞、反作用力和虚拟装配路线部分的扭矩,在虚拟遥操作中远程“客户端”机器人的旋转扭力。这些设备都提供3个自由度(非旋转性位移)的力反馈。另外,两种系统都提供在倾斜、摇摆、偏航方向上的旋转力反馈。Premium 1.5/6DOF设备可以提供大概为人的小臂绕肘部旋转的运动范围。Premium 3.0设备可以提供大概为人的整个手臂绕肩部旋转的运动范围。PHANTOM 1.5/6DOF和3.0/6DOF在Windows? 2000/XP/NT环境下都通过并口与PC连接。支持的操作系统包括:Windows. 2000/XP/NT, RedHat Linux 7.2, RedHat Linux 9, RedHat Fedora, SUSE 9.0.
5. Open Haptics Developers Kit
软件开发人员可以在很广泛的领域利用SensAble OpenHaptics开发包加入触觉和真3D导航特性,这些领域包括从游戏设计到娱乐以及仿真和虚拟。
- OpenHaptics开发保由OpenGL API构建,这对图形开发人员来说是非常熟悉的。
- 利用OpenHaptics开发包,开发人员可以利用现有的OpenGL代码对特殊的几何应用进行开发,也可以作为OpenHaptics命令的补充来 模拟材质触觉属性例如:摩擦感和坚硬度
- 可扩展的架构可以让开发人员加入对新形状类型的支持功能。同时也可以整合第三方库,例如:物理学/运动学、碰撞检测引擎。
- OpenHaptics开发包支持的设备包括:SensAble PHANTOM系列:从低成本的PHANTOM Omni设备到更大型的PHANTOM Premium设备。
开发包的当前版本支持:Microsoft Windows XP and 2000 、 Linux Red Hat Fedora、Core 1 或更高版本、SuSE 9 或更高版本。对Macintosh平台的支持正在研发中。
七、案例分析
1. 具有触觉和远程指导功能的医学穿刺手术仿真器的开发介绍
Handshake VR Inc 拥有proSENSE Virtual Touch Toolbox开发工具,利用该开发工具可以快速的创建仿真内容,包括触觉(一种触感)远程触觉(基于网络的触觉)能力。本文描述了可以进行远程指导的腰椎穿刺(LP)仿真器,腰椎穿刺(LP)仿真仅仅是能通过proSENSE开发工具进行模拟的其中一个医学手术。proSENSE2.0版本允许复杂VRML场景的输入,并包括一种新的可视化链接开发环境,在该开发环境下触觉属性可以场景树形结构的方式添加到物体上。仿真器的关键特征:远程指导,指导者和学员可以在单边或双边模式下进行远程触觉交互。
医学仿真和培训产业在仿真技术和应用方面正经历着快速增长。学员可以在没有危险的模拟环境当中接受培训,因此能够培训出更有信心和经验的医护人员并能增强病人的安全性。本文所描述的腰椎穿刺(LP)仿真器是与北安大略医学院(Northern Ontario School of Medicine www.normed.ca )协作的结果。
2. 腰椎穿刺(LP)仿真器的关键特征
腰椎穿刺(LP)仿真器的目的是:提供这样一个平台,医学专业的学员可以练习在无任何危险无关紧要的情况下将针插入脊柱;系统是为了提供一种机制,指导者能在手术的过程当中与学员进行互动以指导学员。为了达到这些主要目的,仿真器的关键特征包括了:
- 真实脊柱模型;
- 可以模拟针在刺入脊柱时的感觉;
- 可以从多个角度观察该过程,学员可以协同自己的感觉将该手术过程进行可视化;
- 指导者和学员可以通过触觉来交互进行远程指导,本地或基于网络都可以实现。
3. 实现
腰椎穿刺(LP)仿真器利用proSENSE Virtual Touch Toolbox开发。实现过程中利用了工具包2.0的多项新的特征。
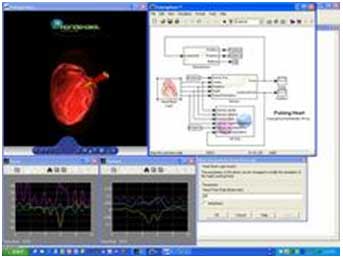
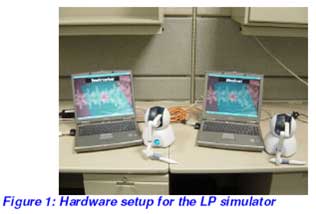
硬件平台由Figure 1表示。硬件平台包括了两台笔记本电脑和两台来自SensAble Technologies公司的Phantom Omni触觉设备。Omni设备控制模拟针三维空间形态来完成手术过程。利用proSENSE和Omni设备,学员和指导者在手术的过程中可以体验到与真实手术非常接近的力反馈作用。计算机用于利用proSENSE创建应用程序,就像运行仿真器那样。在开发过程中,其中一台计算机为学员工作站,而另一台为指导者工作站。计算机由交叉网线连接,有利于两台机器之间的通信;
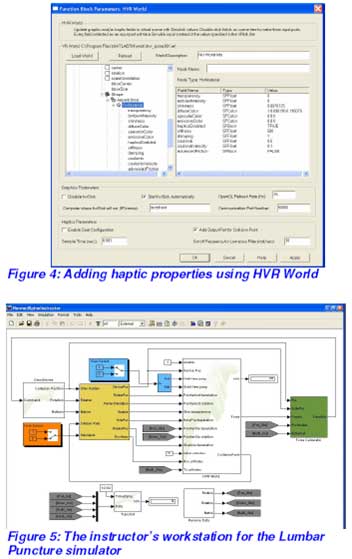
4. 利用HVR World模块将图形内容触觉化
HVR World模块是proSENSE2.0的一个新的特点。通过该模块,开发者可以场景目录树的形式将触觉效果添加到已有的或新的VRML内容当中。Figure 2为HVR World模块的参数界面。
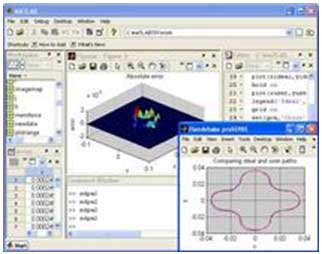
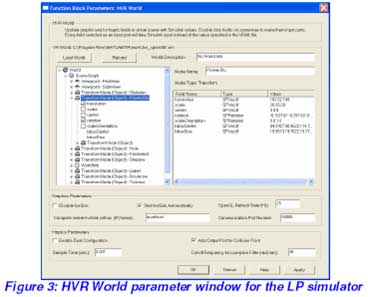
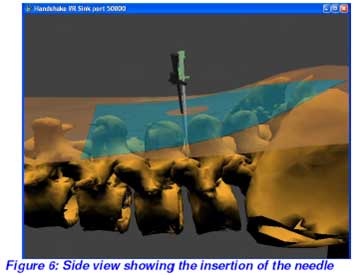
开发的第一步是创建仿真环境的图形表现形式,包括了脊柱和针。包含VRML标准格式的优点在于能利用许多现成的资源。同时,大量的绘图包,例如:Maya1,3ds Max2以及VRealm Builder3都能输出VRML格式模型。这样,现有的脊柱模型就可以被利用起来,这些模型由面集合的数据创建。同样,原来有的针模型(由Omni控制)也可以利用。以上两种情况都由Figure 6表示。Figure 3 表示的是腰椎模拟器应用的参数输入窗口。VRML图形(*.wrl)在proSENSE环境下可以用 “Load World” 按键导入。“world”导入以后,场景图形树形结构将在窗口的左边列出。右边列出了节点名和相关的参数。在Figure3中,“Student’s Needle”(“PointerStu”)的属性显示在了域描述窗口。proSENSE允许对这些值进行静态或动态设置。将该域设为静态值,开发者只要双击属性域并键入值就可以了。
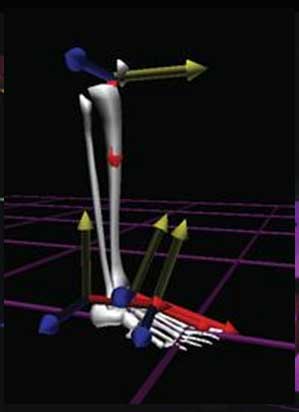
如果要将该域设为动态值,则双击位于场景树形窗口左边域名称的方盒。这里,“translation”域和“rotation”域为动态设置。这些域将出现在Simulink 图表中HVR World模块的输入端口,如图:Figure 5(“PointerStu.translation”、“PointerStu.rotation”)。Figure 6 和Figure 7表示了脊柱和针(学员的和指导者的)完整的图形模型。同时,逻辑已经整合到了Simulink图表中,这样指导者可以在仿真的任何时刻切换视图。
这里描述一下另外一些关键组件。例如,在Figure 6 中,棕褐色透明层和蓝色透明层。棕褐色透明层代表了病人的皮肤,蓝色透明层代表在腰椎穿刺(LP)手术过程中放置于针刺入位置放的布。当学员或指导者按下Omni上的白色按键后,这些层将由透明变为不透明,这样学员在实际的手术过程中感受到更为精确的反馈。将这些层保持透明状态,学员可以快速在两个情景来回切换以带来独一无二的培训体验。
5. 将触觉加入到模型中
一旦VRML模型成功加载,开发者就能为既定的图形对象加入触觉属性。这将再一次的用到HVR World模块的参数界面。
Figure 4表示了骨骼(脊柱)的扩展场景树形结构。Handshake利用VRML原型节点将触觉属性加入到对象当中。在Figure 4中,这些节点被称为“HvrMaterial”。相关域包含了“hapticsEnabled”域及其他触觉属性:硬度、阻力、库仑摩擦力、库仑速率及高级摩擦力。注意:只有在“hapticsEnabled”域设为True的时候触觉属性才能被激活。对腰椎穿刺(LP)模拟器来说,脊柱硬度设为500,阻力设为1,库仑设为0.5,库仑速率设为1。
到高级摩擦力模型。另外,这些域都可以通过命名节点和双击位于场景树形窗口属性域左边的方盒来动态设定。再来看一下Figure 5,HVR World模块产生了一个名为“Force”的输出口。该力命令(其值由HVR World计算得到)基本上是反馈到“OmniDevice”模块(右手边)的“Command”端口以适当的模式驱动触觉设备。
6. 远程指导模式
在proSENSE众多强大的特性当中,其中有一个创建和开发远程触觉应用的功能。proSENSE的网络选项通过以下模块实现:
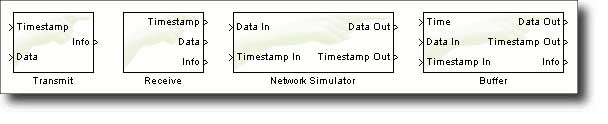
- 网络仿真器模块用来仿真本地网络通信;
- 定制数据包和解压数据包模块用于网络数据的传输。
- 接收和发送模块用于通过网络发送数据(Internet,LAN……)。
- 时间延迟补偿模块用于处理时间延迟事件,例如:Handshake的专利-TiDeC™算法;
回想一下,腰椎穿刺(LP)仿真器想实现的一个功能就是远程指导模式,在该模式下学员和指导者就有机会实时的与场景触觉进行交互。再看一次Figure 5 ,学员工作站和指导者工作站的通信是由proSENSE工具箱的发送和接收模块实现的。在这种状态下的腰椎穿刺(LP)仿真器,针的位置、针的方位、每个Omni设备的按钮状态都将通过网络连接传送到另外一台工作站。这样就可以将学员和指导者针的位置和方位同时在两个工作站上显示并进行远程指导(例如:在Figure 6中绿色和黑色针)。
远程功能和远程模式(单边模式或双边模式)可以通过Omni设备上的蓝色按键控制。如果学员按下蓝色按键,学员的针将从属于指导者的针,也就是说学员可以感受到指导者的指导动作,但指导者不能学员的任何反馈动作(单边模式)。在Figure 7中,带圆圈的绿色箭头表示单边模式被激活。如果指导者按下蓝色按键,将切换到双边模式,由两个带圆圈的绿色箭头表示(Figure 7中“Instructor”字样一边一个)。在双边模式下,学员和指导者能互相感受到来自对方的力的作用。如果不考虑操作模式,则每个用户都能感受到针与骨骼结构的本地触觉效果。
7. 以独立模式运行
proSENSE2.0的一个关键特征是仿真器可以编译为独立模式进行应用(例如:应用程序的运行不需要MATLAB/Simulink或其他任何组件)。对最终用户来说这是非常关键的,用户将不需要购买任何MATLAB/Simulink组件就可以运行仿真器。
为了说明该特性,学员部分的仿真器已经被编译为独立模式,界面表示为Figure 6。指导者部分的仿真器在Simulink的顶部运行。这样,指导者可以通过Simulink图表交互的控制仿真器参数。另外,也可以开发一个允许在独立模式下在两边仿真器上都能运行的用户界面,但是该界面在功能上将完全基于Simulink开发。
8. 附加功能
腰椎穿刺(LP)仿真器基于更高级、功能更丰富的仿真包。这样,在将来的开发当中将包括以下的综合特性:
- 数据采集能力将使对每个学生的客观绩效评估更加方便,学生的表现以工业标准为参照。
- 更加高级的远程指导功能可以让一个指导老师同时指导多个学生。
- 整合TiDeC™对基于网络的培训仿真应用进行优化。
- 在独立模式下创建一个允许指导老师设置仿真参数(例如:病人年龄,组织属性,培训情景)的界面。
- 整合预先设置好的训练情景。
9. 总结
本文讨论了利用proSENSE Virtual Touch Toolbox开发基于虚拟现实(VR)的触觉医学仿真器。创建仿真器需要用到proSENSE2.0 HVR World模块的的许多特性,该模块可以将复杂的VRML场景触觉化。proSENSE让用户即使没有触觉应用的经验也可以快速的创建应用的原型。
腰椎穿刺(LP)仿真器的关键特性之一是远程指导。远程指导可以使指导者在本地或网络的环境下通过触觉来指导学员。可以确信,该特性可以带来更为出色的培训效果。指导者甚至可以 迷你仿真器 改变仿真参数 宕机 创建培训情景。
该平台可适用于多种培训练习,特别是那种需要将针刺入组织的培训。另外,proSENSE平台多种无支架触觉设备。这样就可以构建多功能的、廉价的仿真平台。