










OpenHaptics计算机力和触觉反馈技术开发包
将3D Touch™导航和力反馈特性加入到你的应用中创造出非常令人关注的用户体验。使用户摆脱2D鼠标的局限,从而采用一种更加接近现实的方法与对象进行交互和操作。用户能更加直观和便捷地学习如何在场景中感觉对象及进行应用。同时还能提供给用户以真实的3D导航和直接交互的能力,提高工作效率,也能使你的应用变得更加生动、有趣。
OpenHaptics 套装开发包使软件开发者能够在各种应用中添加触觉和真实3D导航能力,这些领域包括:三维设计、模型制造、医学应用、游戏、娱乐、可视化及模拟仿真。完全基于OpenGL® API开发的可触套装工具,对图形程序员来说将更加熟悉和便于与OpenGL应用相结合。使用OpenHaptics套装工具,开发者可以调用已有的特定OpenGL应用程序,以OpenHaptics命令作为补充来模拟触觉的基本属性,例如:摩擦阻力和惯性。可扩展的体系结构使开发者能添加新的功能特性以支持新应用.这套开发工具包也是为了能结合第三方类如物理/力学和碰撞检测引擎而设计的。OpenHaptics套装工具对SensAble™ PHANTOM®设备的支持从低成本的PHANTOM® Omni™到更为昂贵的PHANTOM Premium。当前版本的套装工具开发包支持微软视窗XP和2000平台.目前正在计划开发对Linux® 和 Macintosh®平台的支持。
OpenHaptics套装工具包包括Haptic Device API (HDAPI), Haptic Library API (HLAPI),实用工具集,PHANTOM 设备驱动(PDD),例子的源代码。HDAPI提供对触觉设备的底层访问,以使触觉设备的编程人员能够快速获得力感,提供对驱动的实时行为的控制,提供方便的功能和调试帮助。HLAPI提供高级的触觉表现功能,设计对象是那些对OpenGL® API编程熟练的程序员。非常有意义的是它允许调用现有OpenGL代码,并且能大大简化触觉设备和图形线程的同步。PHANTOM设备的驱动支持所有已售的PHANTOM设备。

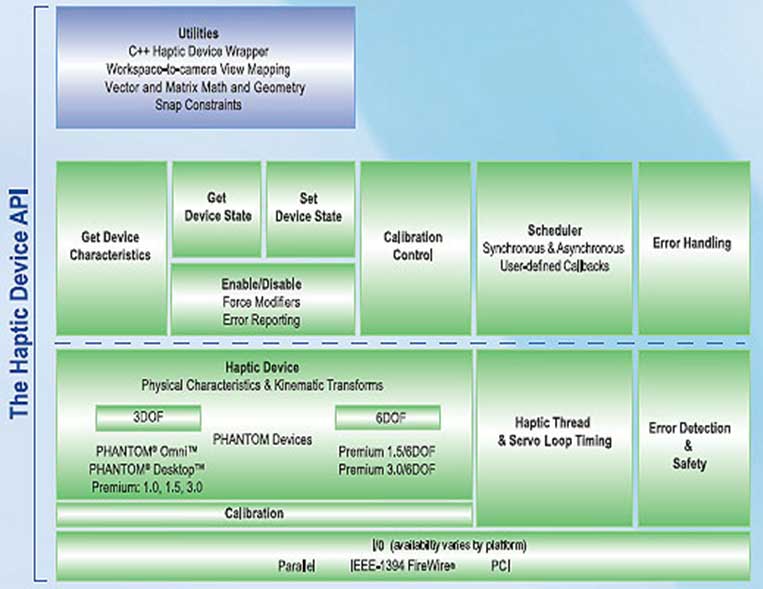
HDAPI 提供对触觉设备的底层访问,以使触觉设备的编程人员能够快速获得力感,提供对驱动的实时行为的控制,提供方便的功能和调试帮助。
关键特征和优势
- 已优化的SensAble PHANTOM 设备,推出了低成本的PHANTOM Omni设备。
- 可扩展的体系结构和操作系统的独立性。
- 软件控制涵盖了以下内容:
- 用户可定制的伺服系统可以产生理想的效果。
- 对错误的处理和安全限制可以使用户有最佳的体验。
- 在触觉线程中设定好的用户定义回调程序可以最大程度的控制同步。
- 在更高级的编程中可以直接访问编译器值和控制马达DAC值。
- 包括了API,实用工具集,实例源代码。
触觉设备API功能集
获取设备状态
- 位置,旋转度,速度
- 3维坐标空间:笛卡尔值,连接点,I/O初始数据 (编译器/DAC值)
- 快捷键
获取设备特性
- 样式,型号,序列号
- 工作空间尺寸,I/O 自由度
- 最大强度,最大力度,最大速度
- 马达温
- 校准能力
设置设备状态
- 在笛卡尔空间的力矩/扭矩
- 马达DAC值
调度程序
- 同步或异步的用户定义的回调程序
- 可定制的时序回调程序
- 可方便的使触觉设备和图形线程同步
- 用户可定制的伺服环路频率
允许/禁止
- 力:输出,箝位,倾斜力 / 错误报告 / 软检测:最大力,最大速度
错误报告及处理
- 错误类别,包括:函数 / 力 / 设备 / 触觉生成 / 时序 / 错误栈
设备校准接口
- 自动校准 / 手动校准
实用工具集
- C++ 触觉设备打包工具 / 工作空间至相机的观察图 / 矢量、矩阵数学和几何学 / 瞬间牵拉的限制
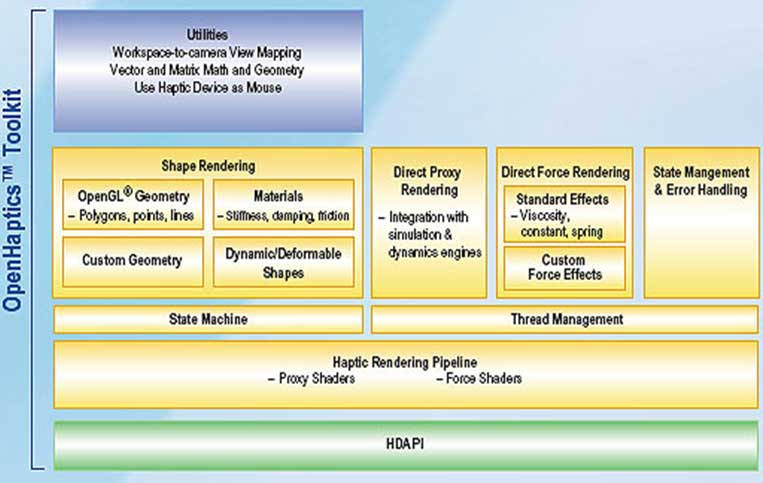
HLAPI提供高级的触觉表现功能,设计对象是那些对OpenGL® API编程熟练的程序员。非常有意义的是它允许调用现有OpenGL代码,并且能大大简化触觉设备和图形线程的同步。
关键特征和优势
- 为那些熟悉图形的而没有前期的触觉设备知识的程序员设计
- 可以调用已有的OpenGL代码从而进行快速的整和
- 为了能结合第三方库如物理/力学和碰撞检测引擎而设计。
- 可扩展的灵活的系统体系结构可以对其他图形库提供更多的支持,例如:Microsoft® DirectX®
- 支持多边形网格,因生成棋盘状的NURBS曲线及细分表面
- 包含API,实用工具,例子的源代码
OpenHaptics API 特性
形状
- OpenGL 基本元素(多边形,点,线) / 自定义/扩展
力作用效果
- 持续的(例如:重力) / 粘滞力,3D 摩擦阻力 / 弹力 / 自定义/扩展
触摸模型
- 单一点 / 支持多点的特性 / 自定义/限制
表面原始属性
- 摩擦阻力 / 强度和阻尼系数 / 前/后的表面
动态的
- 结合第三方库如物理/力学和碰撞检测引擎的钩子程序
可变形的对象
- 结合第三方的钩子程序
事件
- 窗口事件 / 2D 鼠标 / 触觉设备 / 触觉/非触觉 / 铁笔转换器 / 运动 / 校准
PHANTOM® Haptic Devices & Toolkits在力反馈应用开发领域具备最为广泛的应用范围

力反馈设备 PHANTOM力反馈系列产品可以使用户触摸和操作虚拟的对象。不同型号的PHANTOM力反馈产品可以满足商业软件开发、学术、商业研究以及产品设计者的不同需求。其中PHANTOM Premium型号是一种高度精密仪器,可以提供更大的工作空间和力度,其中的一些可以提供6自由度的交互能力。PHANTOM Desktop 和PHANTOM Omni产品则为桌面应用提供了更加经济实用的解决方案。对于这两种产品来说,PHANTOM Desktop 可以保证较高的真实度,较强的力度以及较低的摩擦系数,而PHANTOM Omni则是成本更低的力反馈设备。
OpenHaptics使软件开发者能够在各种应用中添加触觉和真实3D导航能力,这些领域包括:三维设计、模型制造、医学应用、游戏、娱乐、可视化及模拟仿真。完全基于OpenGL® API开发的可触套装工具,对图形程序员来说将更加熟悉和便于与OpenGL应用相结合。使用OpenHaptics套装工具,开发者可以调用已有的特定OpenGL应用程序,以OpenHaptics命令作为补充来模拟触觉的基本属性,例如:摩擦阻力和惯性。可扩展的体系结构使开发者能添加新的功能特性以支持新应用.这套开发工具包也是为了能结合第三方类如物理/力学和碰撞检测引擎而设计的。OpenHaptics套装工具对SensAble™ PHANTOM®设备的支持从低成本的PHANTOM® Omni™到更为昂贵的PHANTOM Premium。

